海底检测技术在过去的数年有了长足的进步,但海底作业效率和成本一直是行业关注的重点之一,再加上海底基础设施数量的猛增,对海底资产普查的方法需要不断创新,解决方案既要改善成本效率,还要保证数据质量,并且能够引领未来的技术平台。
为此,我们开发了C19型快速ROV--海底快搜猎头鲨,其检测效率可以达到传统ROV的2倍,也兼顾AUV的很多优点,还毋需拿上拿下来回充电+后处理,不容易丢,是当前中浅海最理想的的海底快搜模式,一个航次,省下的船费就很令人心动。
就海洋作业而言,降本增效是必要的前置条件,为此我们开发了这款兼顾ROV和AUV优点的复合产品。C19型快速ROV几乎可以搭载大部分的声学设备,各种声呐传感器,还可以搭载高清摄像头、静态照相机,包括管缆搜索器,监控数据实时传送、在线处理,发现疑点可以立即停船,被动拖航和主动搜索立即转换,是水下比较理想的海洋仪器平台,它在水声仪器和海底检测之间搭起一个很好的桥梁,提高了海底检测、搜索的效率。
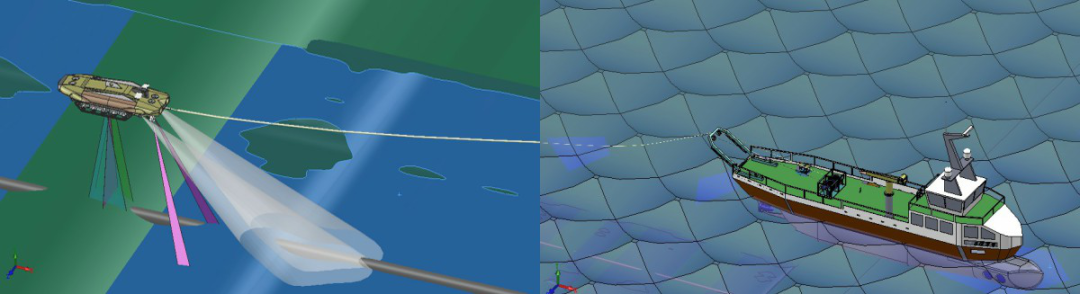
C19型快速ROV可对海底的状况进行实时收集、处理和视像化,并为搜索、测量、物探和地质工作提供快速服务,尤其适合海上油气、风电等的海底管缆维护检测,甚至是海底军事搜索。能够长时间的进行高效水下作业,脐带控制水下ROV有效运行。流线型的动力外形有效降低了水流阻力,被动拖曳和主动搜索两种模式即时转换,被动拖曳时在5节水流下也具备良好的水下深度、姿态、航向控制能力。

海底管道是海上油气田的重要组成部分,由于长期在海洋复杂环境下工作,易受渔业活动、地质灾害等各种复杂因素影响,出现悬空、平面位移、管体损伤等情况,因此准确探明海底管道的状态和位置,可用来预防和排除海底管道的安全隐患。
传统的水下管道检测方法是使用DP2支持船和工作级ROV,通过拖曳式侧扫声呐或浅剖,用ROV定点检查的工作模式。由于ROV框架式的方外形阻力很大,水下速度只能在1.5节以下,并且在强海流条件下容易受到干扰,调查活动完后造成的船舶和人员耗费巨大。深海采用自主水下航行器AUV近底检测已经很成熟,但价值不菲且容易丢失,功能也不如ROV可靠。另外,一般较小的自主水下航行器不适宜安装大型传感器,如管道跟踪器对导航精度有很高的要求,仍然离不开母船支持,并且需要来回充电和读取数据,进行后处理,发现问题再回到疑点处采用ROV复查。
采用快速ROV可以以5节的速度进行拖航检查,并且能适应6节航速度进行声学数据传输,可以适应最高6级的恶劣海况,作业窗口期大为延长。
二、作业方法
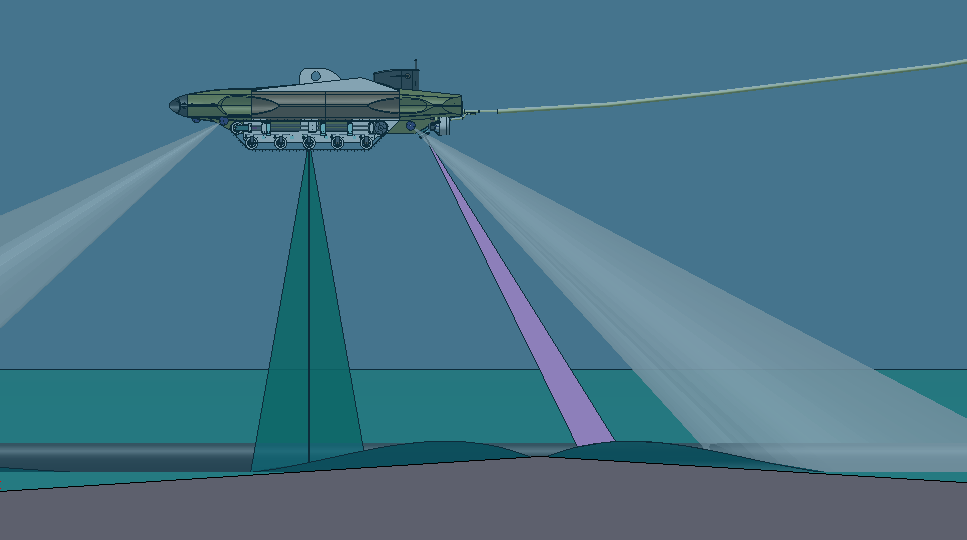
采用侧扫、浅剖和传统ROV摄像,ROV在清水区搭载高分辨率摄像机和超高解析度静态照相机,在浑水区采用三维成像声呐。配备UHD超高解析度静态照相机、4K高分辨率摄像机和水下三维前视声呐,能提供更好的管道勘察的数据,形成更快速得数字图像,见下图所示。
快速ROV巡检效果图
作业流程通常是先使用侧扫声呐和浅地层剖面仪采用大量程低分辨率对路由区进行“普扫”,发现疑似点再采用小量程高分辨率进行“精扫”,然后降低高度进行探测,甚至从两侧沿着海底慢慢抵近观察,获得静态清晰资料,通过对比管道位置变化,判断管道可能存在的问题和具体位置。如果管道没有裸露,具备一定埋深,可以配装TSS440贴底爬行进行检测。采用TSS440同样可以探明其它埋入泥沙的金属或者导电物体。
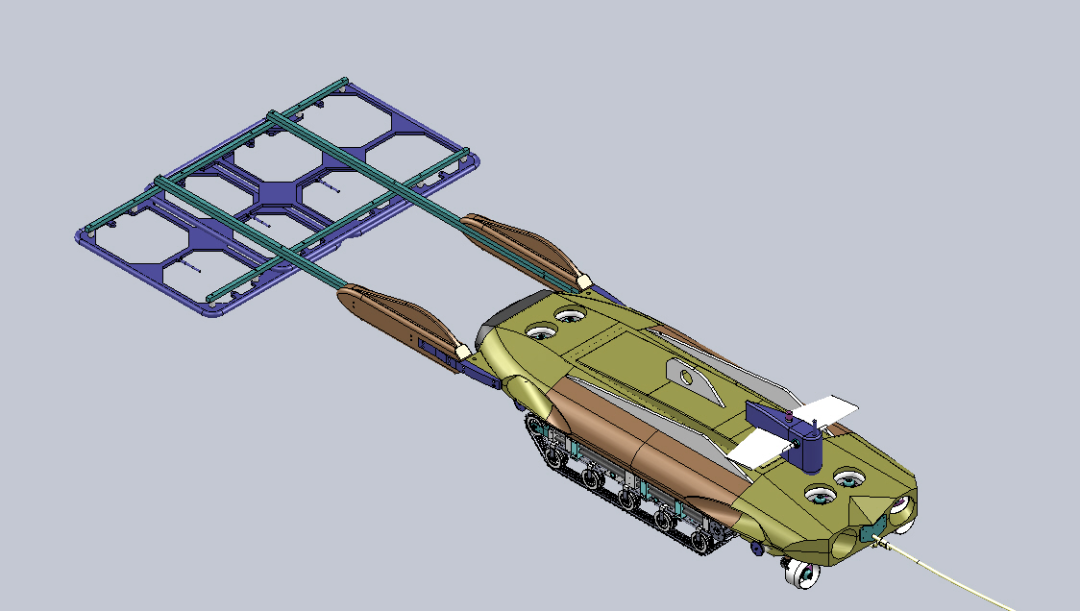
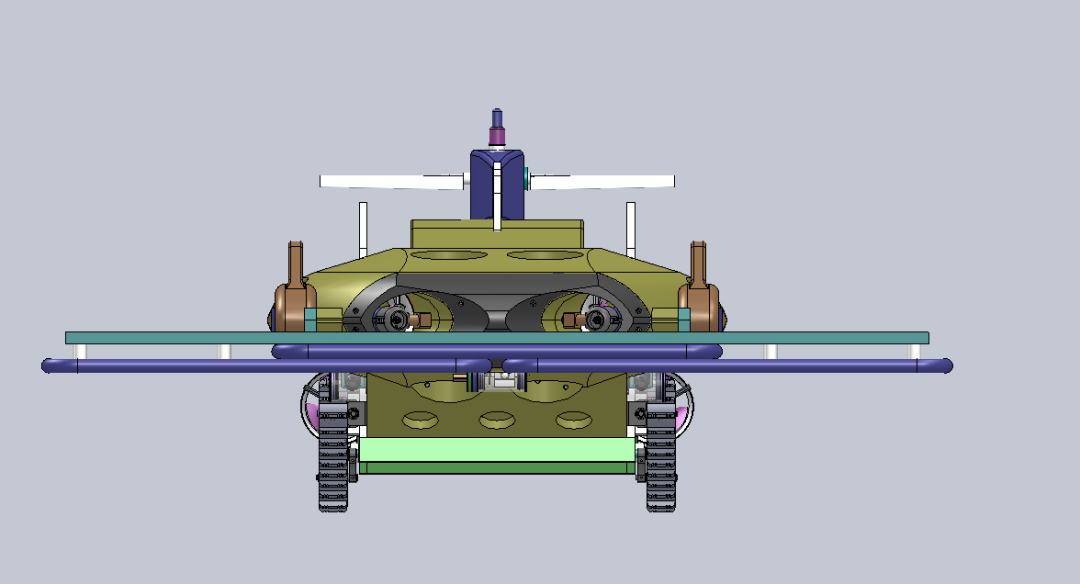
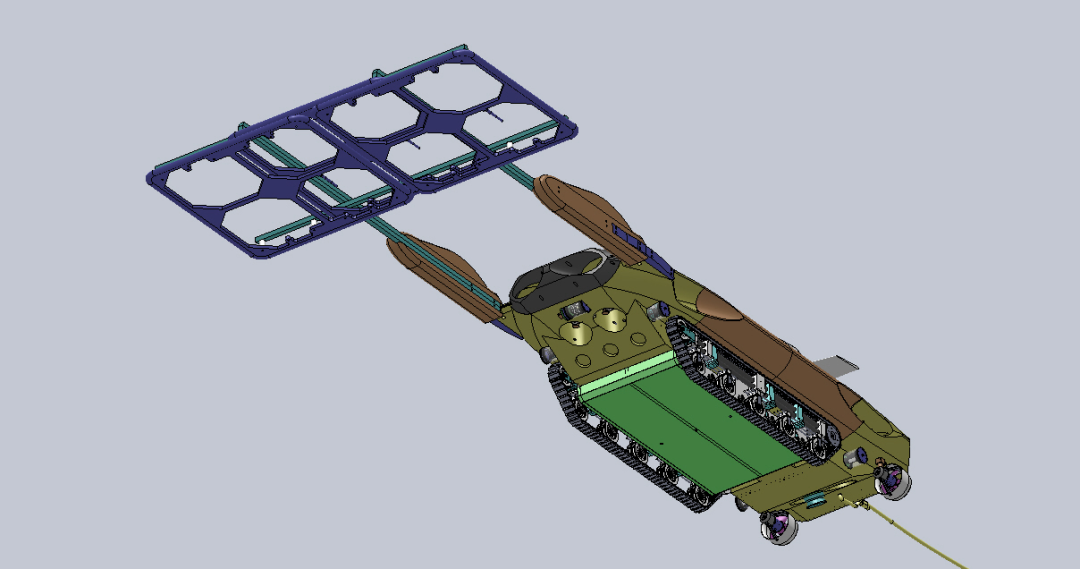
C19型快速ROV几乎可以搭载所有形式的调查传感器,以较快速度进行测量,更具备优势的是在线实时显示功能,发现问题可随时切换成局部多角度精细检查,完成后也可随时切换成路径普扫。搭载TSS440的C19型快速ROV见下图所示。
搭载TSS440的正视图
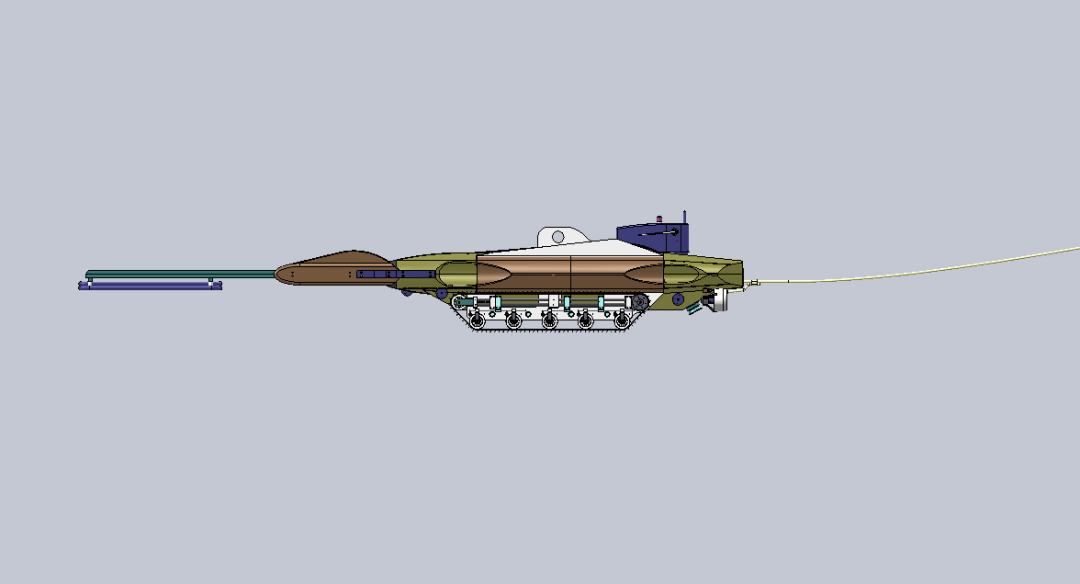
搭载TSS440的侧视图
搭载TSS440的C19型快速ROV的腹部特写
三、主要技术特点
C19型快速ROV是专门为中浅海、浑浊、激流水域设计的一种快速巡检海底管缆的水下机器人,为了提升水下检查速度,C19型快速ROV在设计上做了以下技术改正:
⑴快速ROV兼顾普通ROV和AUV两者特点,AUV的外形,ROV的操控,效率大为提高。
⑵具备快检和细查两项功能,一个航次既可查清问题,节约工期和出海费用。
⑶减少海水阻力,C19型快速ROV将外形设计成飞机一样流畅的水动力布局,推进器进水通道布局合理。管道声学测量工作设计时速5节,可以适应最高6级恶劣海况,为普通ROV或者AUV检查速度的2~3倍。
⑷采用碳纤维外壳,轻而坚固,便于上下船吊放作业。
⑸实时在线检查提供海底检查数据,遥测数据通过光纤同步传输至水面监控站。发现问题可以及时停车投入定点详细检查,细查结束又可马上恢复快检。
⑹光纤传输,信息和数据的传递和交换带宽大,采集的资料质量高。
⑺为了有效控制水下高度的稳定,采用核潜艇的上围壳设计,布置可调水平翼和方向舵,随时根据海底测距声呐数值调整水平翼和方向舵角度,像飞机一样在海中流畅穿行。主动搜索和被动拖曳时方向舵可以360°适应转向。
⑻前段设弹性防撞导流罩,减少阻力,防止不小心撞坏。
⑼底面下开设不同部位的孔槽,方便安置不同功能传感器。同时安装多个传感器,一个航次解决很多问题。
⑽配备10个大推力螺旋桨。其中 4个水平矢量布置,负责前后、左右等水平方向任一角度平动,还可左右转弯;另外4个垂直布局,负责上下升降移动,还可调整本体爬升俯仰姿态,水中定点详细探查时具备稳定悬停能力。后置两个加强前行推力。
⑾复杂的多推进器设计,在软件的辅助下,可有效克服海流对拖体造成的偏航影响。
⑿设计成飞机起落架外形的海底爬行履带,可以在背部4个垂直推进器的作用下形成抓地力,依靠履带附着海床上抵近观察,形成稳定清晰的录像画面。一些受破坏的海域可能存在强水流。本机还可以在4个水平矢量推进器和尾端2个加强推进器的综合作用下,抵御强水流。
⒀重心和浮心布局合理,适应水下高速稳定航行。
⒁采用控制软件,可以原地转弯和左右移动,并可精准控制离地高度,能修正航向对准测线,大量节省了转弯和对准测线时间,测量精度高。
⒂三维图像模型还可以使用户更好地了解管道及其附属结构与海床的关系,给施工修复带来极大方便。
⒃可以搭载更多的传感器。包括以往的传感器(MBES,SSS,HD摄像机,管道跟踪器)和新传感器(UHD静态摄像机,激光标尺,三维激光成像仪,超高清摄像机)等。
⒄动力充足,可满足复杂的探测设备和较大的作业供电。

抵近观察,拍摄三面同步高清影像效果(图片来自于网络)
四、设备组成结构
1
产品配置
⑴水深耐压等级:500米;
⑵推进器数量10个,水平4个,垂直4个,后尾加强2个;
⑶海底爬行履带2条;
⑷拖缆长度:标配1000米(可根据要求加长至2000米);
⑸搭载能力:(空气中净重)60Kg;
⑹总功率:220/380V 20KW;
⑺体积尺寸(mm):2580×960×730(长×宽×高)(高度不含天线);
⑻前进推进力:100kgf;
⑼垂直推进力:60kgf
⑽空气中重量:约350KG;
⑾配备前视主摄像头:4路200万实时无延迟高清低照度星光级彩色摄像头;
海底检测技术在过去的数年有了长足的进步,但海底作业效率和成本一直是行业关注的重点之一,再加上海底基础设施数量的猛增,对海底资产普查的方法需要不断创新,解决方案既要改善成本效率,还要保证数据质量,并且能够引领未来的技术平台。
为此,我们开发了C19型快速ROV--海底快搜猎头鲨,其检测效率可以达到传统ROV的2倍,也兼顾AUV的很多优点,还毋需拿上拿下来回充电+后处理,不容易丢,是当前中浅海最理想的的海底快搜模式,一个航次,省下的船费就很令人心动。
就海洋作业而言,降本增效是必要的前置条件,为此我们开发了这款兼顾ROV和AUV优点的复合产品。C19型快速ROV几乎可以搭载大部分的声学设备,各种声呐传感器,还可以搭载高清摄像头、静态照相机,包括管缆搜索器,监控数据实时传送、在线处理,发现疑点可以立即停船,被动拖航和主动搜索立即转换,是水下比较理想的海洋仪器平台,它在水声仪器和海底检测之间搭起一个很好的桥梁,提高了海底检测、搜索的效率。
C19型快速ROV可对海底的状况进行实时收集、处理和视像化,并为搜索、测量、物探和地质工作提供快速服务,尤其适合海上油气、风电等的海底管缆维护检测,甚至是海底军事搜索。能够长时间的进行高效水下作业,脐带控制水下ROV有效运行。流线型的动力外形有效降低了水流阻力,被动拖曳和主动搜索两种模式即时转换,被动拖曳时在5节水流下也具备良好的水下深度、姿态、航向控制能力。
海底管道是海上油气田的重要组成部分,由于长期在海洋复杂环境下工作,易受渔业活动、地质灾害等各种复杂因素影响,出现悬空、平面位移、管体损伤等情况,因此准确探明海底管道的状态和位置,可用来预防和排除海底管道的安全隐患。
传统的水下管道检测方法是使用DP2支持船和工作级ROV,通过拖曳式侧扫声呐或浅剖,用ROV定点检查的工作模式。由于ROV框架式的方外形阻力很大,水下速度只能在1.5节以下,并且在强海流条件下容易受到干扰,调查活动完后造成的船舶和人员耗费巨大。深海采用自主水下航行器AUV近底检测已经很成熟,但价值不菲且容易丢失,功能也不如ROV可靠。另外,一般较小的自主水下航行器不适宜安装大型传感器,如管道跟踪器对导航精度有很高的要求,仍然离不开母船支持,并且需要来回充电和读取数据,进行后处理,发现问题再回到疑点处采用ROV复查。
采用快速ROV可以以5节的速度进行拖航检查,并且能适应6节航速度进行声学数据传输,可以适应最高6级的恶劣海况,作业窗口期大为延长。
二、作业方法
采用侧扫、浅剖和传统ROV摄像,ROV在清水区搭载高分辨率摄像机和超高解析度静态照相机,在浑水区采用三维成像声呐。配备UHD超高解析度静态照相机、4K高分辨率摄像机和水下三维前视声呐,能提供更好的管道勘察的数据,形成更快速得数字图像,见下图所示。
快速ROV巡检效果图
作业流程通常是先使用侧扫声呐和浅地层剖面仪采用大量程低分辨率对路由区进行“普扫”,发现疑似点再采用小量程高分辨率进行“精扫”,然后降低高度进行探测,甚至从两侧沿着海底慢慢抵近观察,获得静态清晰资料,通过对比管道位置变化,判断管道可能存在的问题和具体位置。如果管道没有裸露,具备一定埋深,可以配装TSS440贴底爬行进行检测。采用TSS440同样可以探明其它埋入泥沙的金属或者导电物体。
C19型快速ROV几乎可以搭载所有形式的调查传感器,以较快速度进行测量,更具备优势的是在线实时显示功能,发现问题可随时切换成局部多角度精细检查,完成后也可随时切换成路径普扫。搭载TSS440的C19型快速ROV见下图所示。
搭载TSS440的正视图
搭载TSS440的侧视图
搭载TSS440的C19型快速ROV的腹部特写
三、主要技术特点
C19型快速ROV是专门为中浅海、浑浊、激流水域设计的一种快速巡检海底管缆的水下机器人,为了提升水下检查速度,C19型快速ROV在设计上做了以下技术改正:
⑴快速ROV兼顾普通ROV和AUV两者特点,AUV的外形,ROV的操控,效率大为提高。
⑵具备快检和细查两项功能,一个航次既可查清问题,节约工期和出海费用。
⑶减少海水阻力,C19型快速ROV将外形设计成飞机一样流畅的水动力布局,推进器进水通道布局合理。管道声学测量工作设计时速5节,可以适应最高6级恶劣海况,为普通ROV或者AUV检查速度的2~3倍。
⑷采用碳纤维外壳,轻而坚固,便于上下船吊放作业。
⑸实时在线检查提供海底检查数据,遥测数据通过光纤同步传输至水面监控站。发现问题可以及时停车投入定点详细检查,细查结束又可马上恢复快检。
⑹光纤传输,信息和数据的传递和交换带宽大,采集的资料质量高。
⑺为了有效控制水下高度的稳定,采用核潜艇的上围壳设计,布置可调水平翼和方向舵,随时根据海底测距声呐数值调整水平翼和方向舵角度,像飞机一样在海中流畅穿行。主动搜索和被动拖曳时方向舵可以360°适应转向。
⑻前段设弹性防撞导流罩,减少阻力,防止不小心撞坏。
⑼底面下开设不同部位的孔槽,方便安置不同功能传感器。同时安装多个传感器,一个航次解决很多问题。
⑽配备10个大推力螺旋桨。其中 4个水平矢量布置,负责前后、左右等水平方向任一角度平动,还可左右转弯;另外4个垂直布局,负责上下升降移动,还可调整本体爬升俯仰姿态,水中定点详细探查时具备稳定悬停能力。后置两个加强前行推力。
⑾复杂的多推进器设计,在软件的辅助下,可有效克服海流对拖体造成的偏航影响。
⑿设计成飞机起落架外形的海底爬行履带,可以在背部4个垂直推进器的作用下形成抓地力,依靠履带附着海床上抵近观察,形成稳定清晰的录像画面。一些受破坏的海域可能存在强水流。本机还可以在4个水平矢量推进器和尾端2个加强推进器的综合作用下,抵御强水流。
⒀重心和浮心布局合理,适应水下高速稳定航行。
⒁采用控制软件,可以原地转弯和左右移动,并可精准控制离地高度,能修正航向对准测线,大量节省了转弯和对准测线时间,测量精度高。
⒂三维图像模型还可以使用户更好地了解管道及其附属结构与海床的关系,给施工修复带来极大方便。
⒃可以搭载更多的传感器。包括以往的传感器(MBES,SSS,HD摄像机,管道跟踪器)和新传感器(UHD静态摄像机,激光标尺,三维激光成像仪,超高清摄像机)等。
⒄动力充足,可满足复杂的探测设备和较大的作业供电。
抵近观察,拍摄三面同步高清影像效果(图片来自于网络)
四、设备组成结构
1
产品配置
⑴水深耐压等级:500米;
⑵推进器数量10个,水平4个,垂直4个,后尾加强2个;
⑶海底爬行履带2条;
⑷拖缆长度:标配1000米(可根据要求加长至2000米);
⑸搭载能力:(空气中净重)60Kg;
⑹总功率:220/380V 20KW;
⑺体积尺寸(mm):2580×960×730(长×宽×高)(高度不含天线);
⑻前进推进力:100kgf;
⑼垂直推进力:60kgf
⑽空气中重量:约350KG;
⑾配备前视主摄像头:4路200万实时无延迟高清低照度星光级彩色摄像头;








